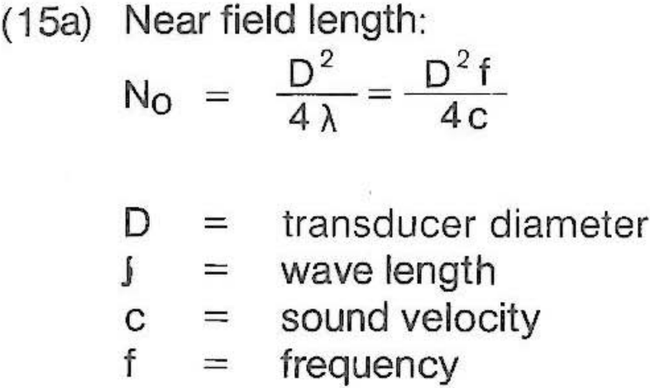
超声波检测中的声束特征
由于超声波的高振荡次数 (MHz) 以及相应的较短波长,超声波源具有很强的方向性。 值得一提的声压振幅 p 仅能在空间的一个很小的扇形区中进行确认。 声场的基本部分(也是测试中最重要的部分)位于声场的一个狭窄区域内,该区域被称为声束。
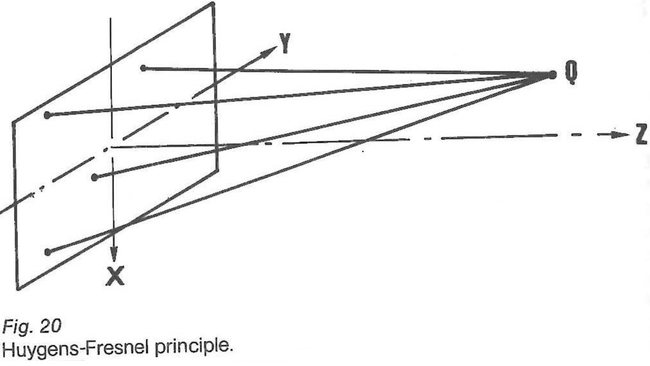
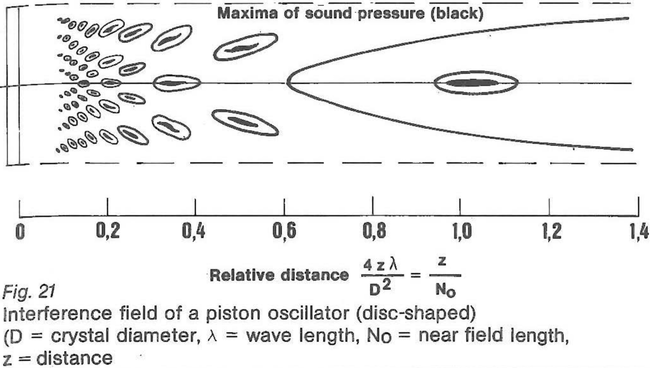
要了解这种定向效应,我们可以将传感器的表面视为一个声音辐射点的阵列。 来自于该点的辐射声波都以球形曲线传播。 它们传播不同的时间后到达空间中的 Q 点(图 20)。 不同的声波在这一点重叠,然后它们会相互干扰,并根据相位和振幅在 Q 点产生总声压。 由于 Q 的不同位置,干扰的效果也会有很大差异。 图 21 展示了使用 D/λ = 10 的晶体时,声波由于干扰而被束缚在一个狭窄的扇形区域内。 在传感器的正前方区域有一个声压变化很大的区域,即“近场”。 传感器最大声压所在的最远位置处标志着近场的末端。 声束在该点最为密集。 每个声源都有这样一个近场,但其形状受传感器外形的影响。
在检测材料时,了解声束的哪一部分适合检测(即探头的工作范围)非常重要。 我们经常会面对这样一个问题:对于圆盘状的平面传感器来说,如果来自点反射器的回波在轴线上最大压力以下,其下降值不会超过一个定值,那么声束的边缘在哪里? 如果探头在声轴上的方向系数 R=1,那么它在轴线外的 Q 点产生的压力 R < 1。
从该处反射的声波会被同一探头拾取,降低的值不变 (R < 1)。 返回信号独立于反射器(点),与声轴相比,其位置用因子 R2 来确定。 在 dB 系统中。

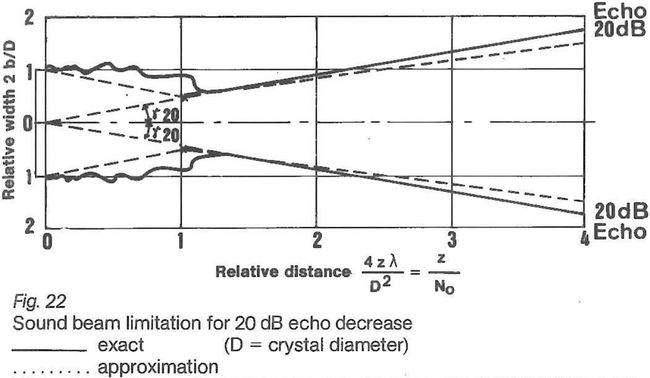
点反射器回波振幅下降 20 分贝意味着自由场下降 20/2 分贝,即 10 分贝。 图 22 准确展示了这种光束在远场中的限制,在近场中则显示为包络线。 除此声束外,其他声压均无需深究。 图 22 展示了探头的声辐射模型。
近场显示的光束直径与晶体直径大致相同,但在近场末端,光束直径缩小到为晶体直径的一半。
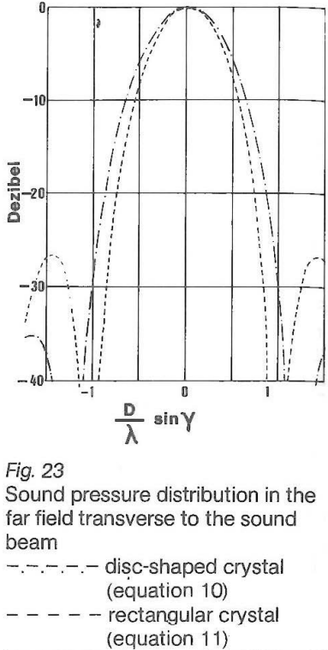
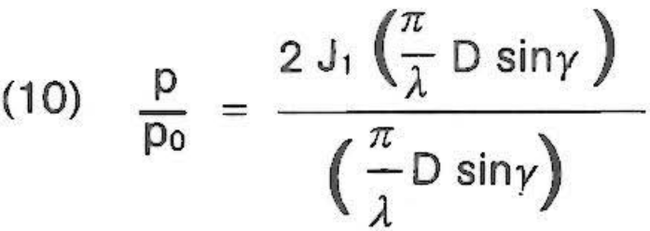
发散角 γ 是恒定值,因为圆盘状晶体垂直于声轴的声压振幅 p 遵循以下公式。
对于矩形晶体,以下内容适用。
其中,对于 s 而言,既可使用晶体的 a 面,也可使用 b 面。 根据公式 10 和 11 以及图 23,下列折射角 γ6 和 γ20 也属于振幅下降 6 分贝和 20 分贝的重要情况
对于盘式振荡器:
γ6 = 反正弦 0.51 λ/D
γ20 = 反正弦 0.87λ/D
对于矩形振荡器:
γ6= 反正弦 0.44 λ/s
γ20 = 反正弦 0.74 λ/s
(s = 振荡器可选的一面(a 或 b))
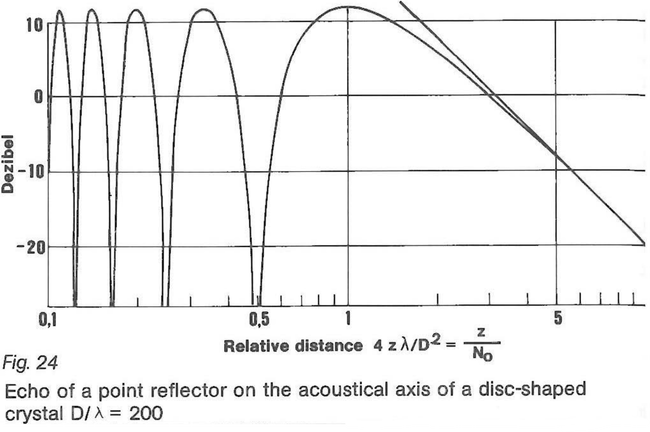
声压 p 随距传感器的距离 z 的变化而变化。 以下适用于盘式传感器:

(D:传感器直径;z:距离)对于较大的 z 距离,公式 (12) 可近似表示为
在 dE3 系统中,这变成为:
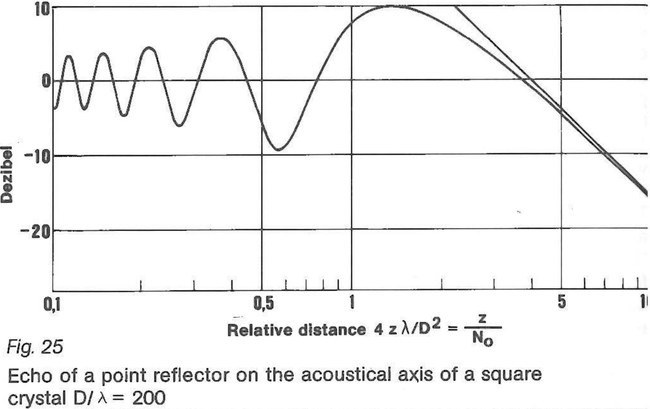
以下内容适用于所有传感器,无论其形状如何:距离较远时,声压振幅随距离的增加而按比例减小(公式 13),或者:针对距离的对数(公式 14)绘制的声压曲线是一条直线。 这种关系所适用的区域就是“远场”。 近场和远场之间的区域被称为“过渡区域”。 图 25 给出了方形传感器的距离定律,该定律不像在方程 12 中那样容易描述。
表 4 是一个辅助表格,用于估算使用盘式及矩形传感器进行自由声场和回波探测时的声束宽度。 接着按如下方式计算光束宽度(从轴线开始测量):
表 5 研究了不同盘式传感器在不同介质中的近场长度。